Nobody likes to receive negative feedback, because this usually means that you have done something wrong or your work was substandard. However, this feedback should feed back into your project to improve things. This is the reason why feedbacks are so important. Some feedbacks in communication are positive (as in, do more of this) others are negative (you should be doing less of this), and this is how we mostly think of feedbacks. What often goes unnoticed is that pretty much everything around us is held in a balance thanks to feedbacks. I am not just referring to your fridge, air conditioner or the speed control on your car (they are all subject to feedbacks), but far beyond our little human world of feedbacks. By this I mean the billions and billions of small and larger feedbacks that control any interaction between for example predator and prey, the weather or our climate. After reading this article you will appreciate all that negative feedbacks do for our climate system.
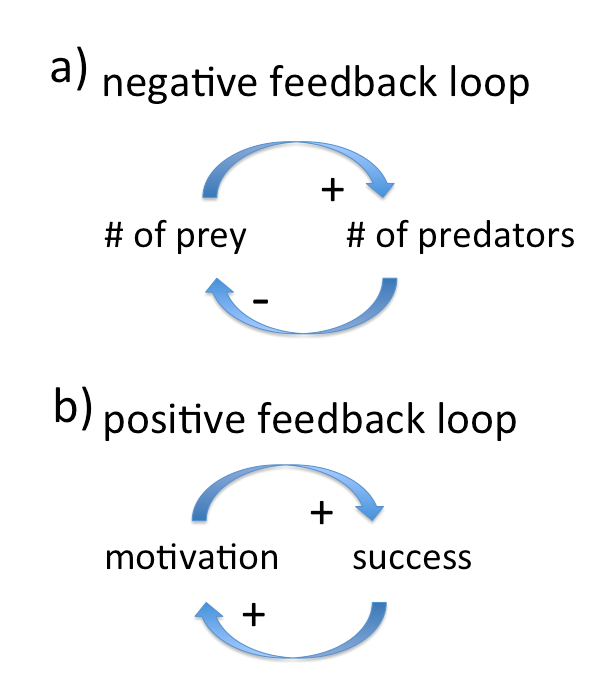
Figure 1: a) negative feedback: A higher number of prey (e.g. hares) leads to a higher number of predators ( e.g. foxes). a higher number of predators however leads to a lower number of prey, ultimately leading to a lower number of predators again. However, with declined predator numbers, the number of prey goes up again, causing predator numbers to rise again. b)a positive feedback: In an ideal world, success leads to higher motivation, which will increase the success again. Also a positive feedback: No success leads to less motivation, which again leads to even less success.
What is a feedback?
A feedback loop is defined as a chain of cause-and-effect. If you were to draw a diagram of all the components of a feedback loop, and then imagine one component or process within it to change a bit, this effect can be traced around the whole system. As such, a perturbation in one part will cause further change in the next, and so on throughout the system until these changes eventually loop around to effect the first component again. If this got your brain all tangled up, I provide you with some simple examples in fig. 1 before we dive into climate- related feedbacks. Generally, there are two types of feedback loops, one is positive (or destabilising) and one is negative (or stabilising) (see fig.1). You see that it may sound different to the feedbacks in communication, where positive feedback generally tends to stabilise, at least for myself quite a bit..
feedbacks and the climate, prominent examples
A very prominent positive feedback in climate science is the ice-albedo feedback (fig. 2): Imagine the temperature goes down. This causes more ice to form at the poles. Because ice is so bright, it reflects sunlight much more than uncovered surfaces. As a result, the heat of the sun is reflected back into space and temperature on Earth goes down even further, causing more ice to form. The more ice there is, the more light is reflected, the colder it becomes on the planet and more ice is formed. This sounds like a scary scenario: a drop in temperature creating too much snow and ice that would at some point spiral out of control to cover our entire planet in snow and ice, turning most of the liquid water available into its solid form. The critical threshold for this to happen is when the ice from the poles has expanded to about 30 degrees from the equator [8] . This is then called a runaway positive feedback. In fact, there is some evidence of several Snowball Earth events in the Earth’s history [4, 2]. Luckily, the greenhouse gas carbon dioxide (CO2) emitted by volcanoes [4] helped recover the Earth into a warmer, more ice-free state. It however takes millions of years for this rescue [6]. While greenhouse gases do play a major role in human induced climate issues today, we need CO2 and other greenhouse gases in the atmosphere to counterbalance this cooling. Just not too much of them.
![Figure 2: Major feedbacks on climate in the absence of life: A) Ice-albedo feedback (picture: [5]), B) water vapour feedback (picture: [3]) silicate-weathering feedback ( picture: [11])](http://scisnack.com/wp-content/uploads/2015/07/Feedback.png)
Figure 2: Major feedbacks on climate in the absence of life: A) Ice-albedo feedback (picture: [5]), B) water vapour feedback (picture: [3]) silicate-weathering feedback ( picture: [11])
In fact, these two positive feedbacks mark the upper and the lower boundary for the habitability on our planet and are therefore very important. We ideally do not want to perturb these feedback loops in a way that causes one to dominate and, be it by warming or cooling of the planet, make it inhabitable for us. So, how does the planet regulate itself to be sure that it does not stumble into either of these runaway positive feedbacks? Of course thanks to other, negative feedbacks. There are many of them but a major negative feedback keeping things in check is the so called silicate-weathering feedback [12] . It achieves this by sequestering atmospheric carbon dioxide. This is important, for example, if we think back to the positive water vapour feedback, remembering that water vapour acts as a greenhouse gas. The removal of CO2 then, as another greenhouse gas, helps to maintain a lower temperature, preventing increased water vapour evaporation. This can be similarly applied to the ice-albedo feedback. But I mentioned that this was an example of a negative feedback and in order to understand this you must know that the process, silicate weathering (fig. 2), is influenced by temperature. The higher the temperature, the faster this process happens (for a quick overview of what happens during the silicate weathering process, have a look at fig. 3 and check out this video). As silicate weathering itself leads to the removal of atmospheric CO2 from the atmosphere this results in a decreased greenhouse effect. This, in turn decreases temperature and will lead to the silicate weathering process becoming slower and subsequently less CO2 being removed from the atmosphere. You may realise that this negative feedback tightly regulates or stabilises itself.
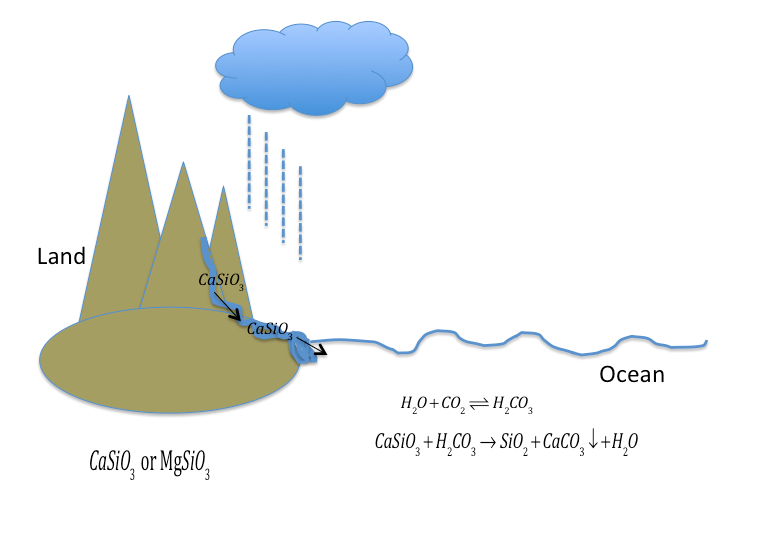
Figure 3: Silicate weathering in a nutshell: when it is warm, there is more rainfall and therefore more runoff into the oceans. That way, generally more soil and small rocks get weathered into the oceans. In the soil and rocks there are different ions ( here shown by CaSiO3), getting weathered in to the ocean. In the Ocean, they react with carbonates (here H2CO3), formed by CO2 dissolving in the ocean. Bound to each other, they are no longer soluble and precipitate out. This removes CO2 from the oceans, and more CO2 from the atmosphere can dissolve in the oceans. Silicate weathering, like volcanic CO2 emissions are part of the inorganic carbon cycle.
feedbacks and life
Carbon removal from the atmosphere is also achieved by many other processes, all subject to and a component of feedbacks. One of those processes is life. An example of this is the assimilation of CO2 by living organisms such as plants which then incorporate it into their structure. Such removal of carbon dioxide from the atmosphere is rather fast in comparison to silicate weathering. If those plants then don’t decay entirely but become buried, this carbon gets buried with them. We know this has happened because we use these old and altered plant remnants as energy sources: coal and oil [10]. Think how fast that ancient carbon gets released back into the atmosphere nowadays. This is a good example of how organisms can alter their environment as they grow and multiply (if only unconsciously), being ultimately again affected in their growth by the environment [7].
The boundaries of habitability of our planet are defined by the two discussed positive feedbacks. Survival would become difficult facing a runaway cooling ice-albedo feedback turning the Earth into another snowball state. Some life, be it in very basic forms, may most likely persist, as it has before during those harsh conditions on Earth [9] . Conversely, a runaway greenhouse effect is likely to be fatal for all life on earth due to accelerated processes of evaporation transforming all liquid water to gas. As gravity loses its grip on the water vapour at higher altitudes this vital ingredient for sustaining life would be lost to space. This is how venus, very close to the sun, is thought to have lost its water [13]. Even those bacteria and archaea that like it hot would not be able to survive without water. While either extreme, cold or hot, would test lifes capacity to endure, it is the loss of recovery mechanisms from a steadily heating planet that would prove most fatal.
climate feedbacks over time
Not just the feedbacks themselves, but the rates at which each component respond are very important. Ice- albedo and water-vapour feedbacks are much faster than the carbon-silicate weathering process removing CO2 from the atmosphere [1]. If you look at figure 2, what would happen, if one very quickly (in geological time scales) increased the amount of CO2 in the atmosphere? Let me tell you: The carbon silicate weathering process amongst other carbon sequestering mechanisms is not as fast in removing CO2 from the atmosphere as we are in emitting it. The increase in CO2 within these 3 feedbacks causes temperature to rise and water vapour to form, a process that is also very fast. And if you have read the above carefully you know how it goes on. I am not saying that emitting CO2 will lead to a runaway greenhouse effect as the Earth has great capacities to stabilise itself again. Rather it is more likely to stumble into new equilibria. Whether that temperature regime supports the life of humans however is not sure, and to be honest I don’t want to try that out. Fridge and air conditioning regulating feedbacks will not help in the long run then though. While all these and many more feedbacks happen at the same time, thankfully the negative feedbacks seem to have the upper hand.
As a bottom line: the Earth ‘s climate is the result of a lot of feedbacks. Negative feedbacks need to be in place to have a relatively stable climate at some sort of equilibria. You can poke the climate system and it is relatively resilient because of those negative feedbacks. However, poking it too much may result in a tipping point and a runaway effect until another equilibrium is reached, kept in check by other responses.
wanna keep digging?
Far from everything has been discovered yet and climate scientists keep working on understanding all the big, small but ultimately fascinating interactions between physical, chemical and biological processes acting together to create the climate we have today. If you want to learn more about the interaction and feedbacks between Earth and life, I recommend the book Revolutions that made the Earth by Lenton and Watson [6], which some of my examples are based on.
References
[1] G. Colbourn, A. Ridgwell, and T. M. Lenton. The time scale of the silicate weathering negative feedback on atmospheric CO 2. Global Biogeochem. Cycles, 29(5):583–596, May 2015. ISSN 08866236. doi: 10.1002/2014GB005054. URL http://doi.wiley.com/10.1002/2014GB005054.
5
[2] P. F. Hoffman and D. P. Schrag. The snowball Earth hypothesis: testing the limits of global change. Terra Nov., 14(3):129–155, June 2002. ISSN 1365-3121. doi: 10.1046/j.1365-3121.2002.00408.x. URL http://dx.doi.org/10.1046/j.1365-3121.2002.00408.x.
[3] Kids Know it Network. Amount of Water Vapor in the Air. URL http://www.kidsgeo.com/ geography-for-kids/0104-water-vapor-saturation.php.
[4] J. L. Kirschvink. Late Proterozoic Low-Latitude global Glaciation: the Snowball Earth. In Proterozoic Biosph. A Multidiscip. Study, pages 51–52. 1992. ISBN 9780521366151.
[5] S. Lamy. Trillions of Pieces of Plastic in Arctic Ice Melt, 2014. URL http://guardianlv.com/2014/ 05/trillions-of-pieces-of-plastic-in-arctic-ice-melt/.
[6] T. Lenton and A. J. Watson. Revolutions that made the Earth. Oxford : Oxford University Press, 2011., 2011. ISBN 9780199587049. URL http://search.ebscohost.com/login.aspx?direct=true& db=cat01883a&AN=uea.003818590&site=eds-live&scope=site.
[7] T. M. Lenton. Gaia and natural selection. Nature, 394(6692):439–447, July 1998. ISSN 0028-0836. URL http://dx.doi.org/10.1038/28792.
[8] G. R. North, R. F. Cahalan, and J. A. Coakley. Energy balance climate models. Rev. Geophys., 19(1): 91, 1981. ISSN 8755-1209. doi: 10.1029/RG019i001p00091. URL http://doi.wiley.com/10.1029/ RG019i001p00091.
[9] P. B. Price and T. Sowers. Temperature dependence of metabolic rates for microbial growth, main- tenance, and survival. Proc. Natl. Acad. Sci. United States Am., 101(13):4631–4636, Mar. 2004. doi: 10.1073/pnas.0400522101. URL http://www.pnas.org/content/101/13/4631.abstract.
[10] H. H. Schobert. Chemistry of fossil fuels and biofuels. Cambridge series in chemical engineering. Cambridge [England] ; New York : Cambridge University Press, 2013., 2013. ISBN 0521114004. URL http://search.ebscohost.com/login.aspx?direct=true&db=cat01883a&AN=uea.003854771& site=eds-live&scope=site.
[11] Southern Kings Consolidated School. Weathering. URL http://www.edu.pe.ca/southernkings/ weatheringjm.htm.
[12] J. C. G. Walker, P. B. Hays, and J. F. Kasting. A negative feedback mechanism for the long-term stabilization of Earth’s surface temperature. J. Geophys. Res., 86(C10):9776, 1981. ISSN 0148-0227. doi: 10.1029/JC086iC10p09776. URL http://doi.wiley.com/10.1029/JC086iC10p09776.
[13] W. R. Watson, Andrew J., Donahue, T. M., Kuhn. Temperatures in a runaway greenhouse on the evolving Venus: implications for water loss. Earth Planet. Sci. Lett., 68(1):1–6, 1984.
Featured Image on home page by Peter Cook.
 0
0
 0
0 0
0 0
0 0
0 0
0Latest posts by Annemarie Eckes (see all)
- Why negative feedback is good for the climate - August 4, 2015
- In the climate model jungle - April 13, 2015